Hi, I'm Arihant
Electronics & Communication Engineer | AI & Robotics Specialist
An Electronics & Communication Engineering graduate with 2 years of experience in robotics simulation and avionics at AeroKLE. Specializing in Computer Vision, AI Engineering, and Robotics to develop intelligent, autonomous, and hardware-integrated edge systems.

My Projects
Filter my work by category to see related projects in Robotics, Embedded Systems, ECE, or Artificial Intelligence.
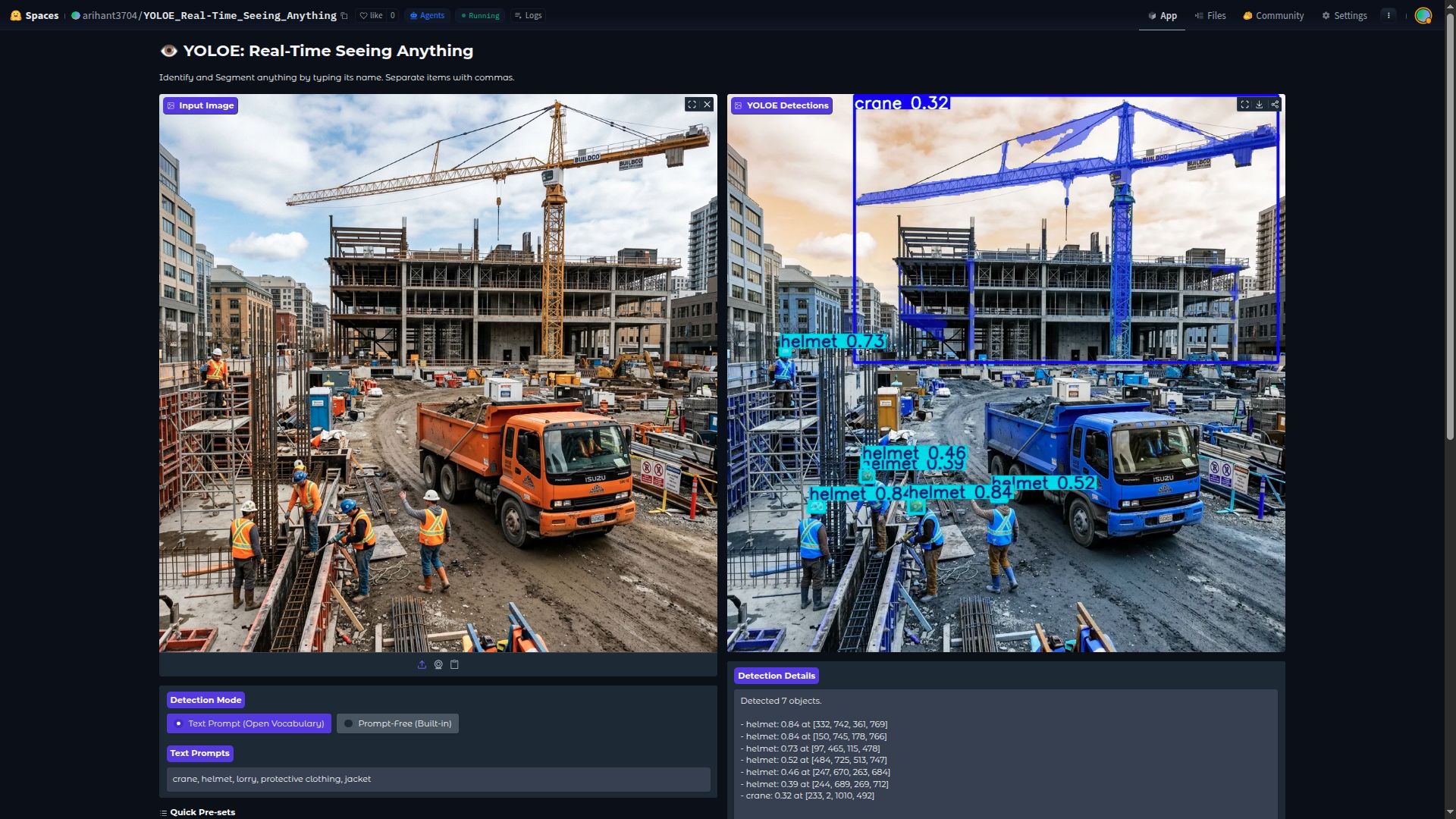
YOLOE Real-Time Seeing Anything
Highly optimized edge object detection pipeline using PP-YOLOE, achieving ultra-low inference latency and high-speed execution for embedded deployment.
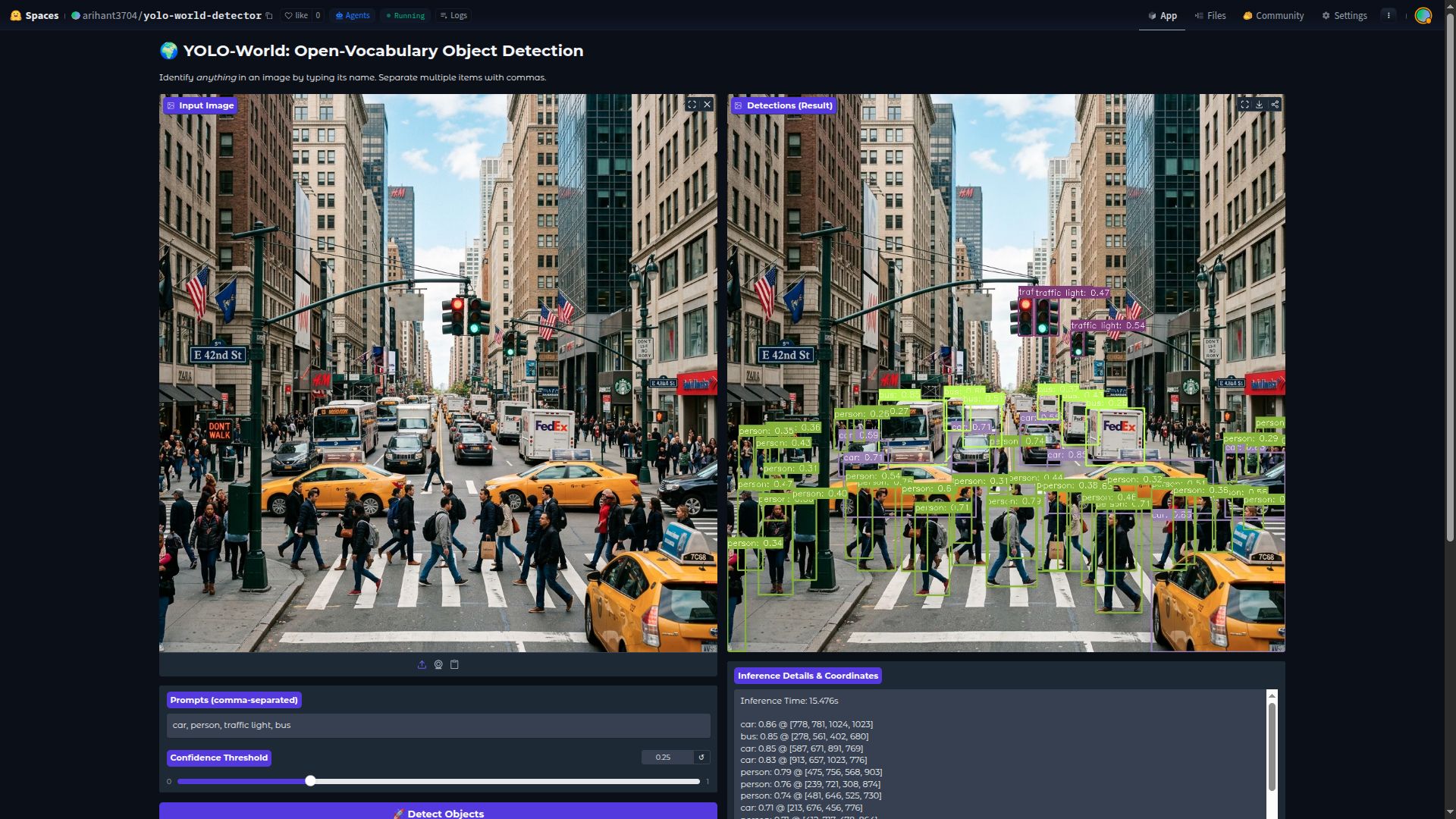
YOLO-World Detector
Real-time open-vocabulary object detector utilizing zero-shot learning and text prompt embeddings to locate any class without explicit retraining.
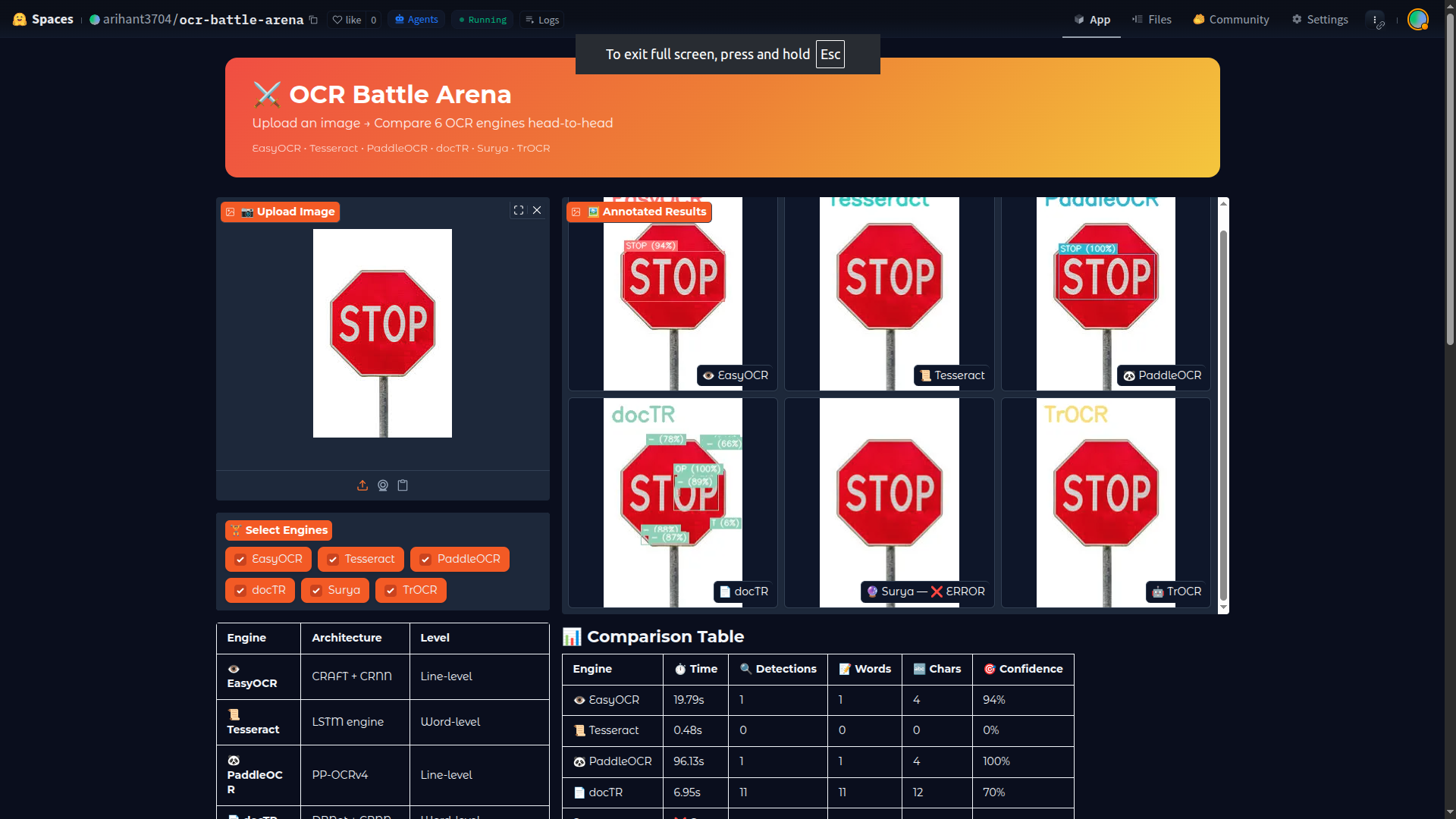
OCR Battle Arena
A benchmarking suite comparing performance, character error rates, and recognition latencies of multiple OCR engines in real-time streams.
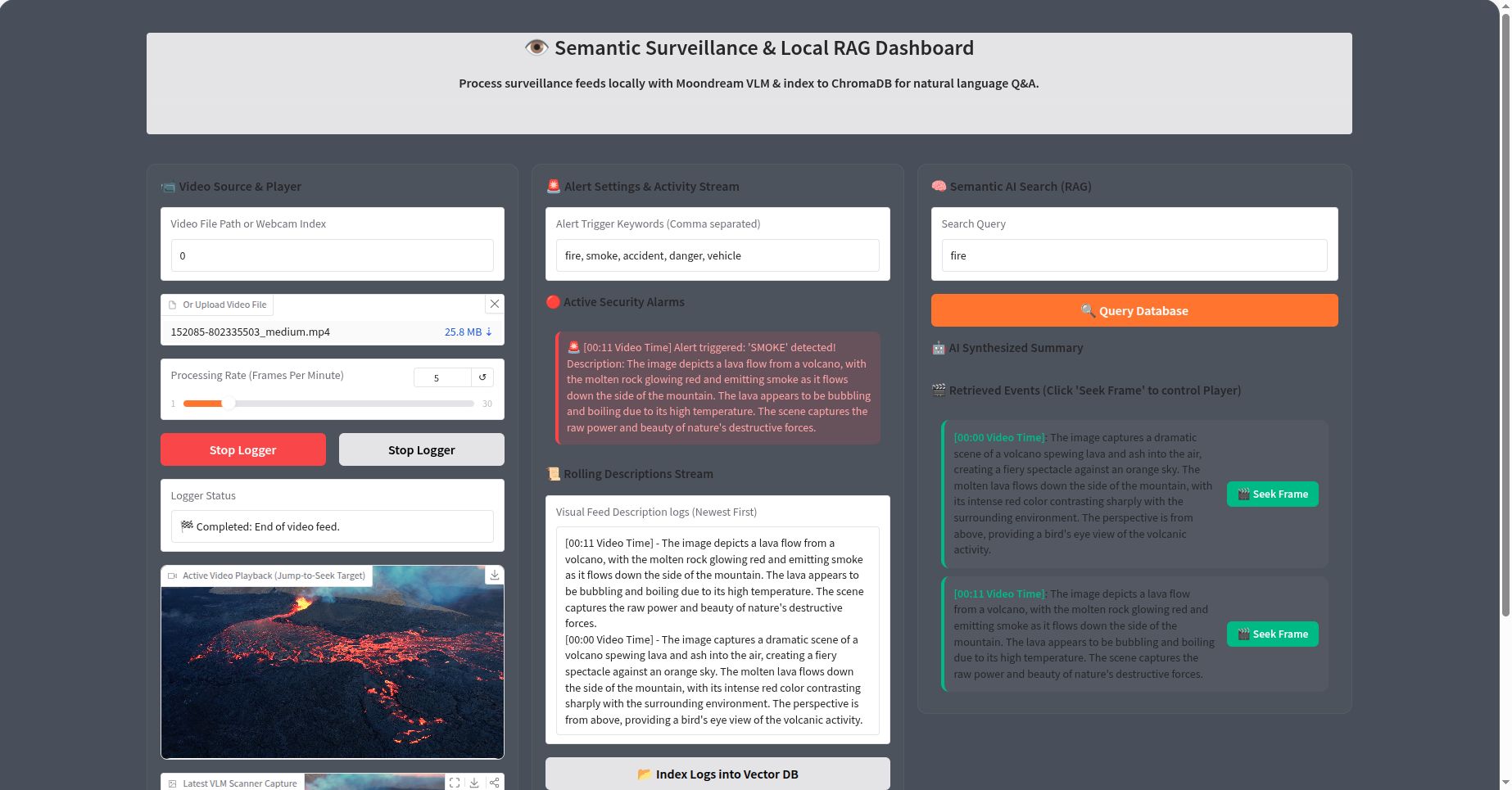
VLM Event Logger RAG
Multi-modal Retrieval-Augmented Generation (RAG) surveillance dashboard that logs video events using Vision LLMs and indexes them for natural language search queries.
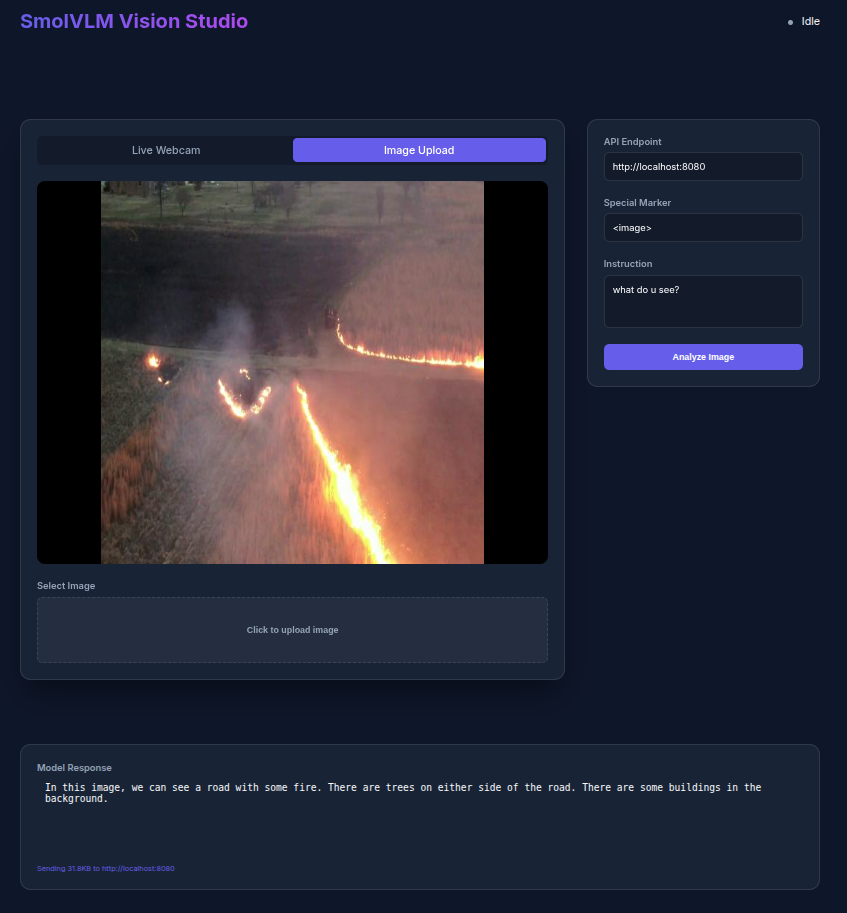
Real-Time Smol Vision
Lightweight VLM applications utilizing SmolVLM for real-time mobile cell phone detection, rod color sorting, and visual reasoning tasks on edge platforms.
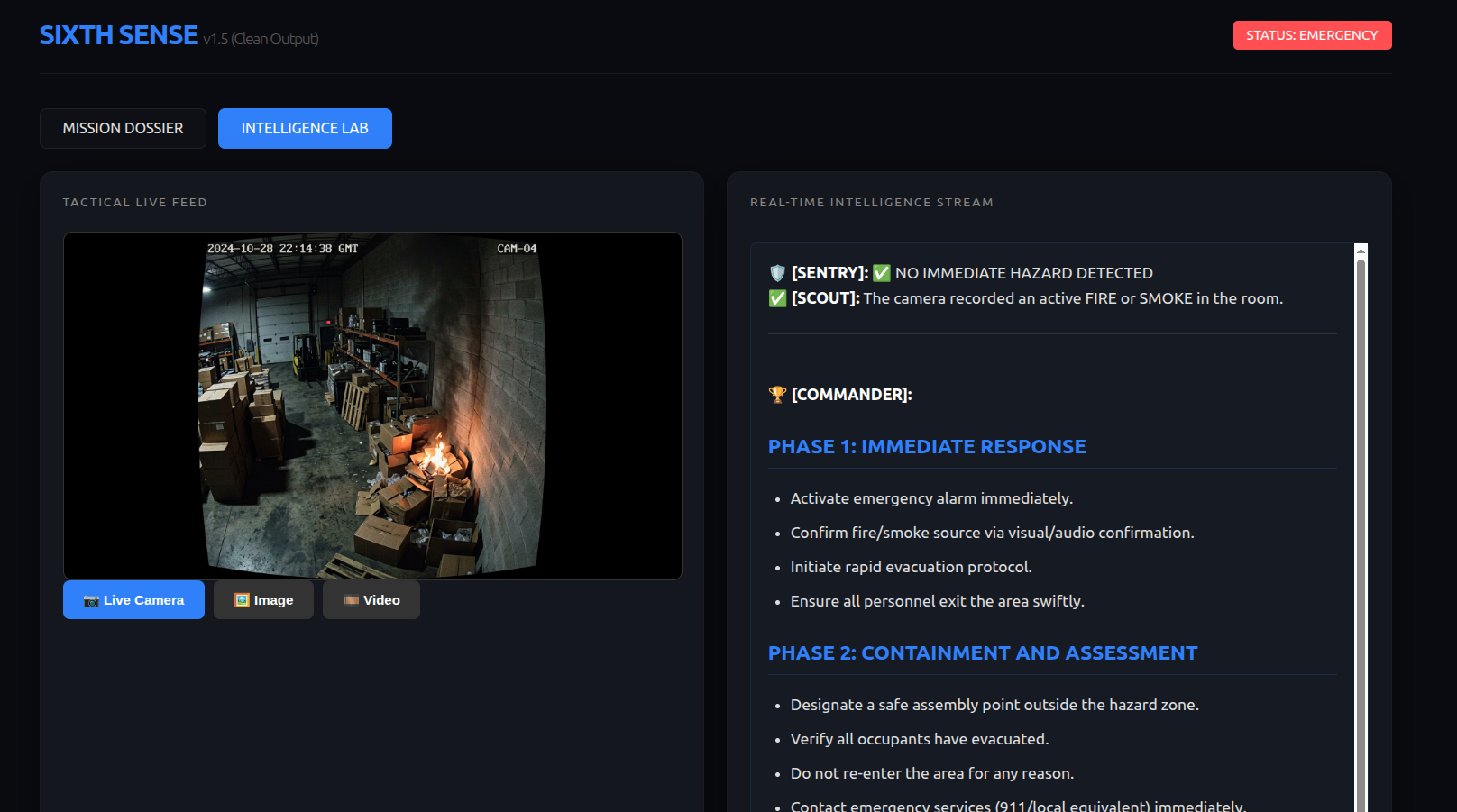
Gemma Elite Surveillance
Local autonomous security agent framework with quantized Gemma models (INT8/FP16) integrated into hierarchical Sentry and Scout nodes for edge intelligence.
Edge AI Object Detection on Raspberry Pi 4
Optimized real-time object detection for resource-constrained edge devices.
- Trained and deployed lightweight models for real-time person/animal detection.
- Optimized inference pipeline for low-latency performance on RPi 4.
- Achieved 89 mAP on custom dataset of 5,000 images with fine-tuned YOLO.
Hardware-Accelerated Object Detection on FPGA (ZCU104)
High-performance inference acceleration using Xilinx MPSoC.
- Implemented YOLO object detection on Xilinx ZCU104 using Vitis AI and DPU IP.
- Performed model quantization and hardware-software co-design.
- Evaluated significant performance improvements over straight CPU inference.
Autonomous AI-Driven Drone – AeroTHON (AIR 3)
Autonomous surveillance and disaster response system.
- Secured AIR 3 at SAE AeroTHON 2024.
- Integrated Computer Vision for hotspot detection and shape classification.
- Implemented path planning/mission execution using ROS and Gazebo.

360° Image Stitching & Autonomous Navigation
Advanced vision-based capabilities for the Quanser QCar.
- 360° Panorama Stitching using 4 CSI cameras with alpha-blending.
- Autonomous yellow line lane following using HSV color space filtering.
Real-Time Car Avoidance & Lane Following
Real-time lane detection and obstacle avoidance framework implemented on the Quanser QCar.
- Integrates vision-based lane tracking with LiDAR-based obstacle sensing.
- Finite State Machine (FSM) control for intelligent maneuvering and lane rejoining.
UAV & Robotics Simulation HUD
An advanced diagnostic telemetry web dashboard visualizing simulated Gazebo flight runs, synchronizing dual-camera playback for trajectory comparison, and streaming ROS stdout console logs.
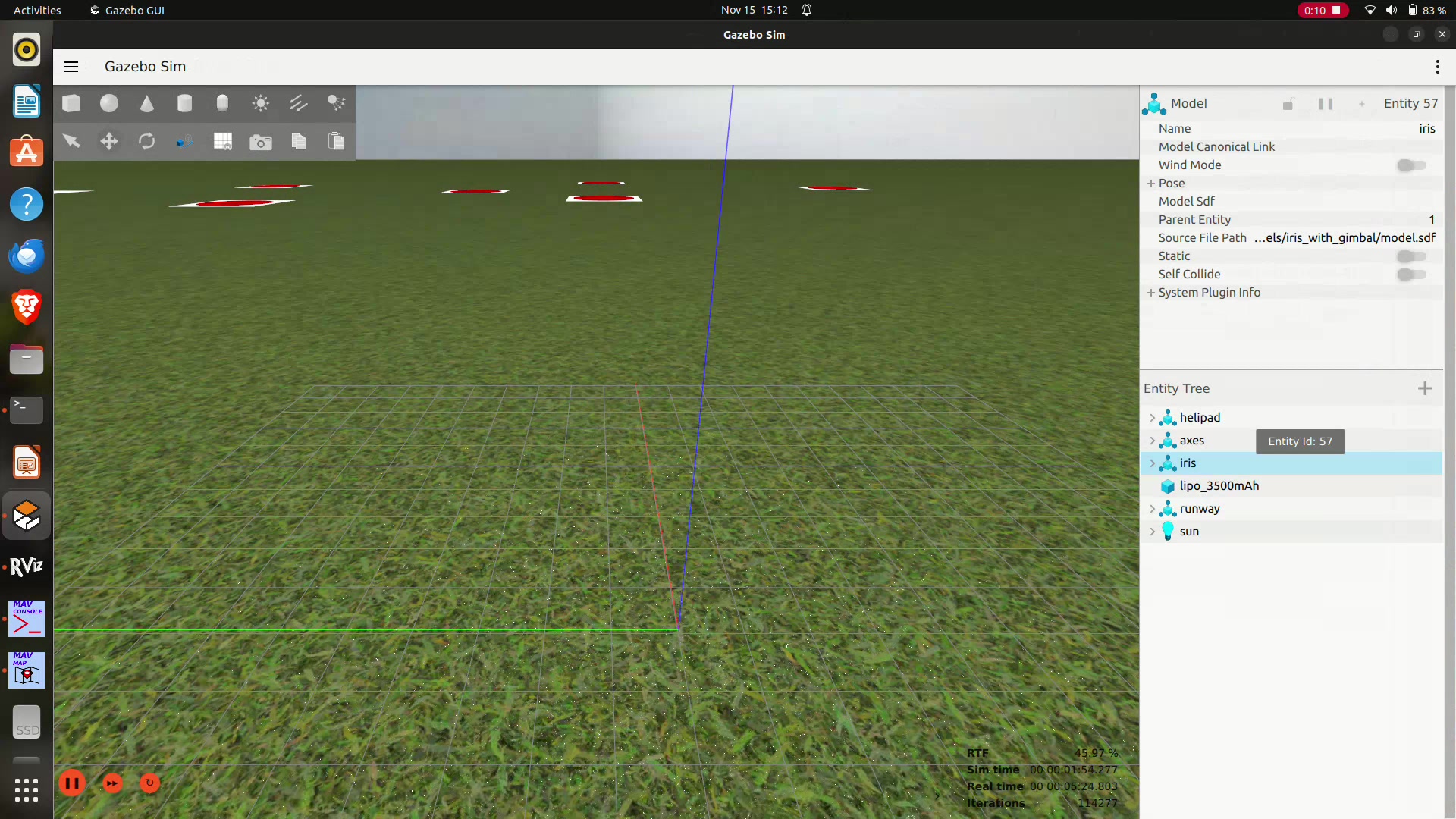
ADDC Precision Landing (AIR 2)
Autonomous precision target landing simulation run.
- Secured AIR 2 (All India Rank 2) at ADDC 2024.
- Isolates landing rings via Hough Circle Transform on downward feed.
- Employs adaptive PID loops for centroid alignment and descent.
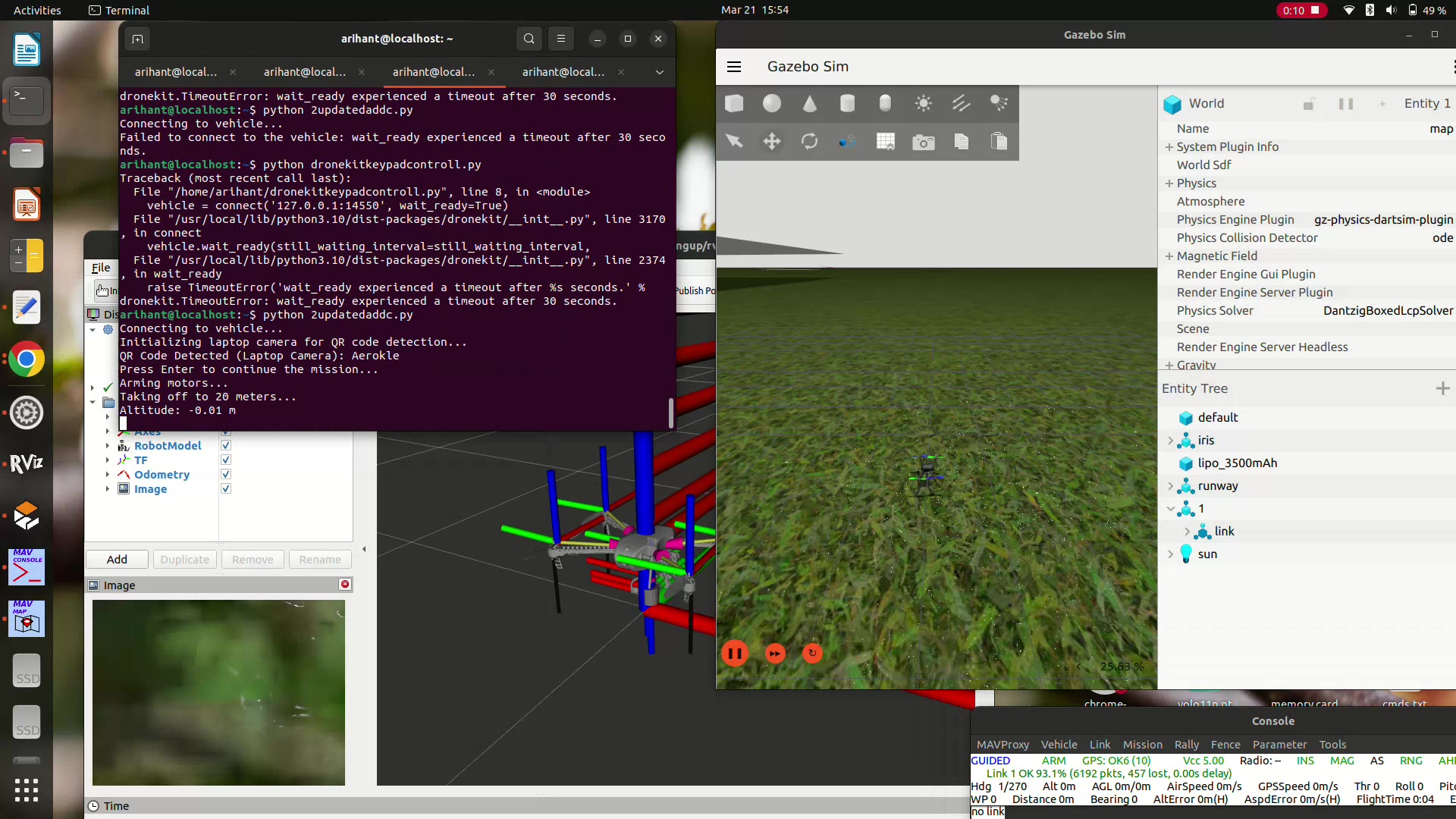
Aerothon 2024 Mission 4 (Serpent M4)
Autonomous slalom trajectory tracking and validation run.
- Secured AIR 3 (All India Rank 3) at SAE Aerothon 2024.
- Integrates cubic Hermite splines to generate smooth slalom curves.
- Maps attitude control rates dynamically to PX4 rates via MAVROS.
Agribot Crop Row Navigation
Crop row centering demonstration for an agricultural ground robot.
- Isolates green vegetation lanes using a custom chromaticity mask.
- Applies Hough Line transform to estimate target road centerlines.
- Outputs steering control parameters directly to chassis motors.
My Skills
A collection of technologies and concepts I'm proficient with.
Python
OpenCV
YOLOv5
Scikit-learn
MATLAB
Simulink
FPGA
Raspberry Pi
Avionics in Drone
ROS2
Gazebo
Jetson Orin
Docker
TensorFlow
Keras
PCB Design
Computer Vision
Machine Learning
YOLOv8
C++
AI Engineering
My Certificates
I believe in continuous learning and professional development.
Computer Vision for Beginners
Cognitive Class • Feb 2026
Credential ID: c493c13a...4381c578a
Verify CredentialTensorFlow-Keras Bootcamp
OpenCV University • Feb 2026
Credential ID: 2be3b393...97ba1715
Verify CredentialInternship on PCB Design
Pantech.AI • Feb 2026
Credential ID: 6982f1807664f5c8818ec4df
Verify CredentialMachine Learning Onramp
View CertificateMATLAB Coder Onramp
View CertificateMATLAB Onramp
View CertificateSimulink Onramp
View CertificateStateflow Onramp
View CertificateVLM Bootcamp
Verify CredentialMy Competitions
Here are some of the competitions I've participated in and our team's achievements.


ADDC 2.0
ADDC 2024 🏆 AIR 2
The ADDC 2024 drone introduced groundbreaking advancements in maneuverability, stability, and payload delivery systems, achieving seamless operation even in complex mission scenarios. The team's commitment to evolution and excellence was evident in every aspect of this cutting-edge aerial vehicle.


TRKSHYA
Aerothon 2024 🏆 AIR 3
With a dynamic and innovative team, the drones were engineered to excel in various autonomous missions, setting new benchmarks in performance and design. Trkshya was tailored for a broad spectrum of operations, demonstrated unparalleled flight stability, structural robustness, and maneuverability, ensuring precise execution of complex tasks. Its aerodynamic profile minimized drag, while advanced thermal management systems enhanced efficiency under demanding conditions.
My Research Papers
Here you can find details about my research contributions and publications.
AutoMedVis: A Multimodal Framework
Addressed the challenge of low health literacy by developing a multimodal framework that integrates cascading LLMs (Gemini, DeepSeek, BioBERT) to visualize medication instructions.
Student Activity Recognition (YOLOv11n)
Leverages YOLOv11n to automate student activity recognition in classrooms, offering high accuracy and efficiency in handling common challenges like occlusions.
Cross-Platform YOLOv8 Benchmarking
Evaluates YOLOv8 performance across embedded platforms, identifying the Jetson Orin Nano as the optimal balance between accuracy, speed, and energy consumption.
FPGA Accelerated Object Detection
Explores the deployment of YOLOv5-Nano on FPGA platforms, utilizing hardware acceleration to achieve real-time object detection with reduced power consumption.
About Me
Hello! I'm Arihant Appannavar, an Electronics & Communication Engineering graduate specializing in Robotics, Computer Vision, and AI Engineering. Over the past 2 years, I worked extensively with the AeroKLE team on robotics simulation, UAV avionics system design, and autonomous flight architectures.
I specialize in bridging the gap between hardware and software. My expertise spans deploying deep learning pipelines (like YOLOv8/v11) on edge devices (Jetson, Raspberry Pi), designing custom hardware accelerators on FPGAs, and building high-fidelity simulations in ROS2 and Gazebo. I am eager to apply my skills in Computer Vision, AI Engineering, and Robotics to solve complex industrial challenges.
My Experience
My professional journey and hands-on experience in the industry and technical teams.
Computer Vision & Machine Learning Intern
DocketRun Technologies Pvt. Ltd.
- Learned OCR, Transformer, VLM ,ANPR and other computer vision techniques and made projects on them.
- Implemented a Person-with-Harness Detection system using YOLO-based object detection models to ensure worker safety compliance.
- Designed a Conveyor Belt Monitoring System to detect material presence and belt movement status (Moving / Not Moving) using vision-based analysis.
- Performed dataset preparation, annotation, preprocessing, model training, and evaluation for ANPR .
- Optimized real-time inference pipelines using Python and OpenCV for industrial video streams for edge deployment on Jetson .
Avionics Engineer
AeroKLE Aero-Design Team, Hubli
- Contributed to the development of a semi-autonomous drone for surveillance and disaster management applications.
- Developed and integrated autonomous path-planning algorithms for drone navigation.
- Worked on simulation and testing of autonomous systems using ROS and Gazebo.
- Integrated Computer Vision modules for hotspot detection and object-based navigation.
- Secured AIR 3 in SAE AeroTHON 2024 and AIR 2 in SAE ADDC 2024 as part of the Avionics subsystem team.
Avionics Intern
AeroKLE Aero-Design Team, Hubli
- Assisted in UAV avionics system design and flight-control architecture development.
- Configured drones using Mission Planner for waypoint navigation and telemetry setup.
- Integrated Raspberry Pi 4/5 boards with sensors and communication modules for onboard processing.
- Gained hands-on experience in UAV systems, embedded programming, and autonomous flight operations.
Get In Touch
I'm always open to new opportunities and collaborations. Feel free to reach out via email, phone, or LinkedIn!